STM32 — организация виртуального COM-порта

 Раз у камня есть аппаратный USB, то грех им не пользоваться. Один из способов плюнуть байтом в компьютер и чтобы он при этом не очень обиделся — это организация виртуального COM-порта.
Раз у камня есть аппаратный USB, то грех им не пользоваться. Один из способов плюнуть байтом в компьютер и чтобы он при этом не очень обиделся — это организация виртуального COM-порта.
Все в железе пробовалось на камне STM32F103ZE, на аналогах тоже должно взлететь.
Забиваем.
Как я уже говорил, пока я сторонник библиотечных решений. Памяти хватает, байтовыцарапыванием заниматься рано. Так что пойдем по легкому пути.
Точные названия я привожу на случай если на сайте производителя будет какая-нибудь реорганизация и ссылки станут невалидными.
Не забываем дрова виртуального ком-порта. У меня вообще-то оно само все нашлось, но я много чего ставил от STM, может там в комплекте и пришлись.
Также нам пригодятся следующие стандарты
USB 2.0 Specification
USB CDC
В составе библиотеки есть пример как раз организации виртуального COM-порта. Правда там он сделан как мост USART-USB, но мы же не боимся трудностей?
Цель этой статьи — разобрать приложение, делающее следующее: 
Поджигаем
Собираем проект из нужных нам библиотек: CMSIS, SPD, USB. Дерево проекта прилагаю. 
Как обычно, самое интересное в папочке /src. Вот её-то и будем разбирать.
Неторопливо курим
Начнем с раскуривания библиотеки от STM

Эта библиотека предназначена и для connectivity-line устройств (это STM32F105/107), у них не просто USB FS, а USB OTG. Поскольку камней с OTG у меня пока нет, сконцентрируемся на простом USB FS.
В примере, который мы взяли за основу, есть куча дефайнов, как раз на случай отличить connectivity-line от других демоплат. Я эти дефайны повырезал, чтобы глаза не мозолили.
Cо всей картинки нас интересует High Layer — синенькие квадратики, которые и составляют, собственно, пользовательскую часть библиотеки. Их мы меняем под свои нужды, все остальное остается неизменным. Если заглянуть в папочку /src, то видно, что все эти файлики там и собраны.
Первая затяжка — usb_conf.h
Самые общие настройки библиотеки.
Указано сколько у нас будет endpoints (а нам их надо 4 штуки — нулевой для начального конфигурирования устройства, один для команд, один для приема и один для передачи).
Также расписаны, какие нам будут нужны коллбэки. Все взаимодействие библиотеки и пользовательской программы построено на обратных вызовах: в случае возникновения какого-либо события вызывается функция с заданным названием. А уже содержание этой функции — проблема разработчика.
Нам будет нужен SOF_CALLBACK – сигнал начала фрейма (Start Of Frame). По нему будем выплевывать то, что накопилось в буфере передачи.
Также резервируем еще два коллбэка — на прием и передачу. По приему символа будем мигать светодиодами, чтобы уж как-нибудь задействовать канал приема.
Упс, кончился файл. Короткая получилась затяжка.
Файл берем из примера, ничего не меняем.
Вторая затяжка — usb_desc.h / usb_desc.c
В этих файлах находятся дескрипторы устройства и эндпоинтов.
Информация по стандартным дескрипторам есть в стандарте USB, в разделе 9.6 Standard USB Descriptor Definitions
Специфические дескрипторы описаны в USB CDC, раздел 5 (так и называется Descriptors),
Эти все тонны текста в стандартах для того, чтобы USB стала действительно Universal. Поэтому тщательно выведена классификация устройств и интерфейсов — чтобы глянув на дескриптор хост сразу понял, что с этим делать.
Особо подробно разбирать смысла не вижу — это не характерно для STM32, это общая боль разработчиков USB устройств.
Файл берем из примеров, ничего не меняем.
Продолжение дескрипторов — usb_prop.h / usb_prop.c
В этих файлах описана таблица реакции на запросы. Все запросы к устройству пронумерованы и стандартизованы. В этих файлах определяется массивы функций Device_Property, User_Standard_Requests и просто массивы String_Descriptor, например. Это все используется ядром. Когда в устройство приходит определенный запрос, например «Выдай мне дескриптор устройства», то ядро посмотрит в таблице, какая функция обрабатывает этот запрос, вызовет эту функцию, а оно уже отработает:
Опять же, берем файл из примеров.
Прерываемся — usb_istr.h / usb_istr.c
Тоже два коротеньких файла. В них находится то, что надо вызывать при приходе прерывания от USB. Поскольку прерывание одно, то по значениям флагов определяется событие и вызывается соответствующий коллбэк.
Прерывание будет настраиваться в файле hw_config.c, обработчик выглядит очень просто:
void USB_LP_CAN1_RX0_IRQHandler(void)
<
USB_Istr();
>
его можно разместить в файлах stm32f10x_it.*, а в данном проекте, чтобы не растекаться мысью по древу, я его включил в файл main.c
И тут особо ничего не меняем, все как в примере.
Питание — usb_pwr.h / usb_pwr.c
Здесь все, что касается питания. По стандарту, устройство может быть переведено в режим спячки, тогда, если оно питается от порта, нужно позаботиться об отключении жрущей периферии. Поскольку у нас плата питается отдельно, то особого смысла в управлении питанием нет. Просто устройство формально переводится в состояние SUSPENDED.
Ничего не меняем, файл из примеров.
Коллбэки — usb_endp.c
Этот файл я переписал, поскольку у нас не будет работы с USART, как это было в примере. Приведу код с комментариями:
Работа с железом — hw_config.h / hw_config.c
В этом файле собраны функции инициализации периферии, прерываний, функции управления светодиодами и работы с буфером отправки.
USB-порт и подтяжки на моей плате сделаны по такой схеме: 
И USB_EN заведен на пин PF11. Значит надо не забыть его проинициализировать и дернуть вовремя.
По сравнению с примером, выкинуты функции инициализации и работы с USART, добавлена функция мигания светодиодом.
По приему символов ‘A’, ‘B’, ‘C’, ‘D’ – зажигаются соответствующие светодиоды, ‘a’, ‘b’, ‘c’, ‘d’ – гасятся.
‘1’ и ‘0’ — соответственно зажигают и гасят все светодиоды.
Ну и все, что будет передано функции USB_Send_Data() попадает в буфер, а затем и через USB – в комп.
Уфф. С USB вроде закончили.
Теперь в головной программе можно просто вызывать USB_Send_Data() и посимвольно передавать данные в комп.
Если мы на этом остановимся, то размер кода будет порядка 11 кБ:
Более двух килобайт bss – это буферы приема и передачи. Понятное дело, их можно уменьшить.
Выдыхаем — printf()
Но мы же хотим, чтобы вывод функции printf() перенаправлялся в наш свежесозданный COM-порт. Подключаем и офигеваем от количества ошибок линковки:
А тут все просто — стандартная библиотека ввода-вывода подразумевает работу с файлами, но в больших системах есть ОС, которая собственно и занимается организацией файлов для программ пользователя. А поскольку у нас нет никакой ОС, то библиотека вполне справедливо недоумевает «А что же мне делать-то?»
Вот, чтобы это обойти, в проект включается файл newlib_stubs.c
В нем находятся функции-заглушки ко всем вышеперечисленным ошибкам. Но и кроме этого, есть одна функция, которую нам и надо переписать, чтобы весь вывод шел в USB:
Видим, что как раз и вызывается наша функция USB_Send_Data()
Все, компилим, собираем, запускаем.
Архив с проектом прилагаю — это на случай, если кто не заметит маленькие буковки внизу 🙂
STM Урок 33. HAL. USB. Virtual Com Port
Урок 33
HAL. USB. Virtual Com Port
Отладочную плату ипользуем ту же: STM32F4-DISCOVERY.
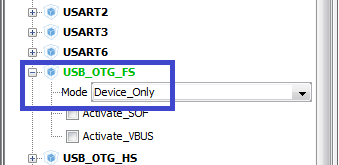
Проект создаём из проекта I2CLCD80. Назовем его USB_OTG_CDC. Запустим проект в Cube, включим USB_OTG_FS в режим Device_Only
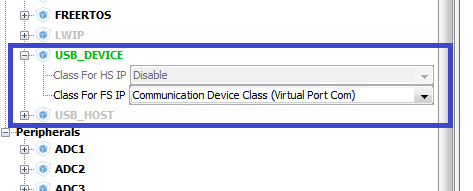
В USB_DEVICE в разделе Class For FS IP выберем пункт Communication Device Class (Virtual Port Com).
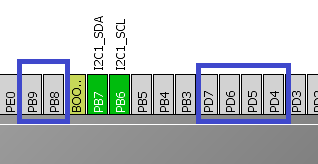
Лапки портов PD4-PD7, PB8, PB9 отключим, это пережиток прошлых занятий
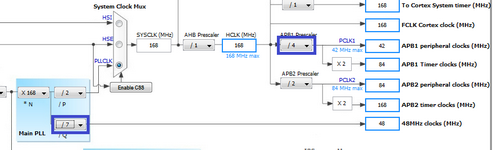
В Clock Configuration выберем следующие делители (нажмите на картинку для увеличения изображения)
В Configuration ничего не трогаем, т.к. прерывания там выставились сами.
Сгенерируем и запустим проект, подключим lcd.c и настроим программатор на автоперезагрузку.
Соберем проект. Прошьём контроллер. У нас появится неизвестное устройство, скачаем драйвер на наше виртуальное устройство usb. Для этого зайдем на сайт st.com, в строке поиска там вводим virtual com port, скачиваем и устанавливаем драйвер. Затем желательно зайти в папку с установленным драйвером, выбрать папку, соответствующую разрядности нашей операционной системы, и запускаем также установку и оттуда.
У нас скорей всего устройство установится с ошибкой (код 10)
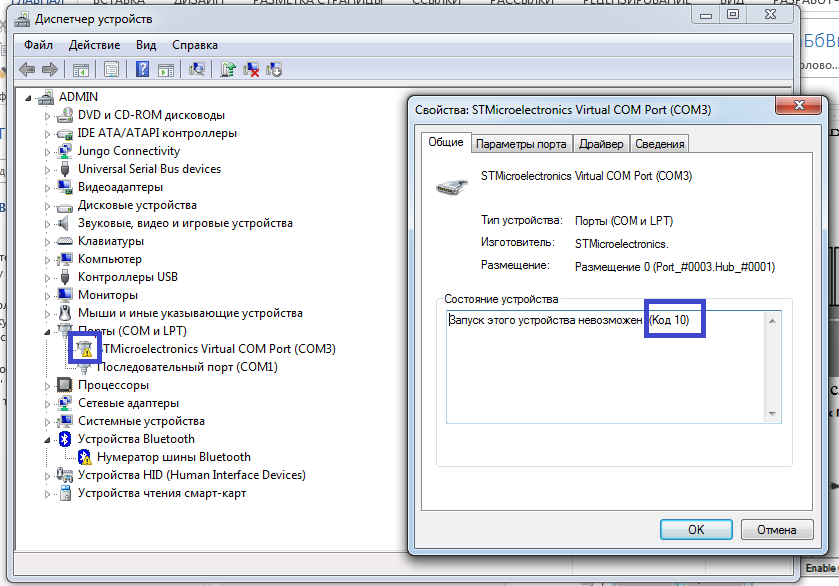
Есть несколько типов решений, мне понравился именно этот, т.к. более простой: в файле usbd_cdc.h заменим размер пакета, вместо 512 напишем 256 в данной строке:
#define CDC_DATA_HS_MAX_PACKET_SIZE 256 /* Endpoint IN & OUT Packet size */
Соберём, прошьём и увидим, что ошибка исчезла.
Сначала попытаемся передать данные на ПК.
Для этого мы сначала откроем файл usbd_cdc_if.c и исправим там в 2х строчках 4 на 64
/* It’s up to user to redefine and/or remove those define */
#define APP_RX_DATA_SIZE 64
#define APP_TX_DATA_SIZE 64
В файле main.c закомментируем весь пользовательский код кроме инициализации и очистки дисплея
Также в main.c подключим файл usbd_cdc_if.h для видимости функций приема и передачи
/* USER CODE BEGIN Includes */
Немного изменим в главной функции строковую переменную, убавив в ней размер и добавив префикс tx
В файле usbd_cdc_if.c добавим прототип функции передачи, скопировав объявление из реализации данной функции в том же файле
/* USER CODE BEGIN PRIVATE_FUNCTIONS_DECLARATION */
uint8_t CDC_Transmit_FS(uint8_t* Buf, uint16_t Len);
/* USER CODE END PRIVATE_FUNCTIONS_DECLARATION */
В main() внесём данные в строку
В бесконечном цикле попробуем эти данные отправить в порт USB, используя функцию, прототип которой мы добавили
CDC_Transmit_FS((unsigned char*)str_tx, strlen(str_tx));
/* USER CODE END WHILE */
Соберём код, прошьём контроллер и посмотрим результат в терминальной программе.
Вроде передать нам что-то удалось. Теперь попробуем что-нибудь принять. Здесь чуть посложнее, т.к. для этого используется уже обработчик прерывания, коим является в файле usbd_cdc_if.c функция CDC_Receive_FS.
Добавим ещё одну строковую глобальную переменную в main()
/* USER CODE BEGIN PV */
Объявим её также и в файле usbd_cdc_if.c
/* USER CODE BEGIN PRIVATE_VARIABLES */
extern char str_rx[21];
/* USER CODE END PRIVATE_VARIABLES */
В функцию CDC_Receive_FS в этом же файле добавим некоторый код и кое-что закомментируем
static int8_t CDC_Receive_FS (uint8_t* Buf, uint32_t *Len)
Добавим переменную в main()
Занесенные в наш буфер данные попробуем вывести на дисплей, для этого в бесконечном цикле в функции main() добавим определённый код
CDC_Transmit_FS((unsigned char*)str_tx, strlen(str_tx));
Соберём проект. Прошьём код и посмотрим результат, вводя в терминальной программе и отправляя в порт USB какие-нибудь строки.

18 комментариев на “ STM Урок 33. HAL. USB. Virtual Com Port ”
«Есть несколько типов решений, мне понравился именно этот, т.к. более простой: в файле usbd_cdc.h заменим размер пакета, вместо 512 напишем 256 в данной строке….»
Просто измените размер кучи (Minimum Heap Size) в настройка CubeMX. Вместо значения 0x200 задайте 0x400.
И комп увидит устройство без ошибок.
При инициализации структур компилятору элементарно не хватает места, заданного по умолчанию, для выделения памяти.
Пардон, очепятка вышла. Не компилятору, а функции malloc.
Спасибо, так действительно проще.
Спасибо огромное за ваши материалы по STM32 , подключил TFT 320×240 – все отлично работает . Вернулся к материалу для подключения флешки . Все отладочные средства у меня находятся на VirtualBox ( W7 ) . Скачал по вашей инструкции и поставил драйвер Virtual com port . Он поставился , но в диспетчере задач ничего не появилось ни в разделе com портов , ни в других . Может вы сталкивались с подобной проблемой ? Если нет – в любом случае еще раз спасибо за проделанную работу .
Сначала не смог реализовать данный пример на SystemWorkbench в части приёма данных и передачи их из функции приёма в main посредством массива str_rx с модификатором extern – компилятор ругается на использование неопределённых переменных, а если задать ему какие-нибудь значения, то только эти заданные значения и будут передаваться. Вышел из положения объявив массив обмена str_rx в заголовочном файле usbd_cdc_if.h
Спасибо.Я сделал так.В хидер usbd_cdc_if.h добавил две строчки
extern uint8_t UserRxBufferFS[1000];
uint8_t receiveBufLen;
В метод CDC_Receive_FS добавил перед return receiveBufLen = *Len;
И в main ловил данные просто одним условием
if(receiveBufLen > 0)// если получены данные от ПК
<
HAL_Delay(250);
CDC_Transmit_FS((uint8_t*) UserRxBufferFS,receiveBufLen);
// эхо для наглядности
receiveBufLen = 0;// сброс получения
>
Всё просто,а UserRxBufferFS чистить не нужно от мусора,он сам чистится.
Здравствуйте! Спасибо огромное за ваши уроки, тут пожалуй лучший ресурс с уроками по стм32!
Хочу спросить, а как использовать CDC_Receive_FS в main.c? Я проделал в usbd_cdc_if.c «эхо», но мне нужно принимать из него и гнать дальше. Наверное вопрос больше в целом по си чем по контроллеру, а то иначе мне получается надо много всего переносить в usbd_cdc_if.c.
Думаю, что следует добавить в main.c функцию, а в файле usbd_cdc_if.c – на неё прототип и вызвать её в CDC_Receive_FS, И весь свой пользовательский код затем писать в файле main.c.
Это именно СИ. Так что обязательно подтяните свои знания по языку.
Ох, видимо сперва надо читать коментарии, прочитал тот что выше.
При переходе на USB cтолкнулся с такой проблемой. Скажем, конструкция, приведённая в примере, а именно
sprintf(str_tx,»USB Transmit\r\n»);
CDC_Transmit_FS((unsigned char*)str_tx, strlen(str_tx));
работает без проблем. Но, если я делаю так
sprintf(str_tx,»USB Transmit»);
CDC_Transmit_FS((unsigned char*)str_tx, strlen(str_tx));
CDC_Transmit_FS((unsigned char*)»\r\n», 2);
то CDC_Transmit_FS((unsigned char*)»\r\n», 2); не срабатывает (не успевает) и данные летят без переноса строки. Если ставить задержку, то работает как надо. По неопытности, может, это я и принял бы как должное, если бы перед этим не работал бы с UART где такая же конструкция работает без проблем. Для работы с UART уже написана довольно хорошая часть программы и менять её структуру очень не хочется, тем более, что данные передаются не в текстовом формате а в посылке имеется несколько меток. Что можно сделать, чтобы посылки могли идти подряд без задержки?
Скорей всего придется делать конкатенацию передаваемых строк с помощью strcat. Была аналогичная проблема при использовании CDC. Автор применял этот метод в одном из уроков.
Здравствуйте
А если я хочу передавать данные с микроконтроллера на компьютер?
Константин:
А мы их туда и передали.
Установил различные драйвера VCP от STM, но при этом плата не определяется при подключении её к компьютеру. только виден STLink Virtual COM Port. Кто уже сталкивался с такой проблемой.
Оказалась, что проблема с дровами. Надо их полностью сносить и устанавливать заново.
Hello, I’m new to STM32. How do I send int32_t value via usb CDC from ADC input ? or How to convert int32_t to char?
You can use(for example):
sprintf(str_tx,»ADC:%d \r\n»,ADC_Data);
CDC_Transmit_FS((unsigned char*)str_tx, strlen(str_tx));
where ADC_Data is your ADC value.
Спасибо за примеры. С USB в базовой библиотеке что-то не так. При первом подключении ком порт работает, но при передергивании USB – становится неизвестным устройством, иногда не сразу а через 5-10 секунд после повторного подключения…
Сейчас копаю в сторону функций вызываемых на отключение и подключение USB. Первое что кажется подозрительным, то что на подключение вызывается инициализация а на отключение USBD_LL_Suspend, затем на подключение снова инициализация, хотя есть USBD_LL_Resume. Пока дальнейших идей нет. Может что-то подскажете?