Как проверить работу gps на windows
Часовой пояс: UTC + 3 часа
![]()

![]()
Столкнулся некоторое время назад с такой проблемой:
Винда не видит внешние GPS приёмники (большинство) в программах Карты (встроена в Вин10) и ЯндексКарты для Вин10.
Отмечу, что ЯндексКарты для Вин10 удобны не только тем, что они есть для 10-й Винды, но и совместимостью кэша с мобильными ЯндексКарми для Android.
Как оказалось, такая проблема была с внешними приёмниками и в Вин7, и в Вин8.
Начал копать и выяснил, что какое-то время назад Microsoft отошла от виртуальных СОМ-портов (как в Озике) и «придумала» протокол «Sensor and Location Platform», который не совместим с приёмниками, работающими с СОМ-портами.
То-есть, владельцы ноутбуков и планшетов под управлением Windows, не оснащённых встроенными GPS-приёмниками оставались без отличных и удобных навигационных программ ЯндексКарты и других.
Копал, копал и вчера наконец-то решение нашлось
Jсталось проверить его на другом компе и я расскажу, как совместить несовместимое с точки зрения Microsoft оборудование.
Прим.: только для Вин10, других операционок у меня уже нет.
Подтвердилось, решение нашлось!
Проверено на ветеране Bluetooth GPS GS BT-338 от Интерфейса и USB модуле за 500 руб из Китая
![]()
![]()
![]()

![]()

_________________
Один за всех — все за одного. .
![]()
![]()
_________________
Один за всех — все за одного. .
Часовой пояс: UTC + 3 часа
Кто сейчас на конференции
Зарегистрированные пользователи: нет зарегистрированных пользователей
Подключение GPS-приёмника к ноутбуку и создание GPS-треккера
Многие любители путешествий давно уже стали пользоваться GPS-девайсами при проведении своего досуга.
Кто-то использует навигаторы для переезда из одного населенного пункта в другой по ближайшей трассе/дороге, используя при этом, как правило, навигационные программы с векторными картами. А кто-то предпочитает более эстремальное времяпровождение, добираясь из пункта А в пункт Б по ближайшему пути на внедорожниках. Для последних векторные карты не так важны, здесь главное знать особенности рельефа ближайшей местности, и используются навигационные программы с растровыми картами, привязанными к координатам.
Я задался целью, подключить внешний GPS-приёмник к ноутбуку, на который можно установить различные программы для работы с векторными и растровыми картами, чтобы получить удобный инструмент планирования маршрута и просмотра текущего местоположения. Одновременно с тем хотелось передавать данные GPS на сервер, чтобы моё местоположение можно было отслеживать удаленно (импровизированные GPS-треккер).
Итак, если Вам интересна эта тема, добро пожаловать в топик.
Что имеем:
- Коммуникатор с GPS
- Ноутбук
- 3g-модем (можно исключить)
На ноутбуке должен быть установлен определенный софт:
- Для синхронизации КПК с ПК (в моём случае «ActiveSync» — для Windows XP, либо «Центр устройств Windows Mobile» — для Windows 7, Vista);
- Навигационные программы. Например, OziExplorer (для растровых карт), SASPlanet;
- Программа для обработки GPS-сигнала с приемника.
На КПК так же должен быть установлены дополнительные приложения:
1) GPSGate.
Сначала добьемся передачи GPS-сигнала с внешнего устройства на ноутбук.
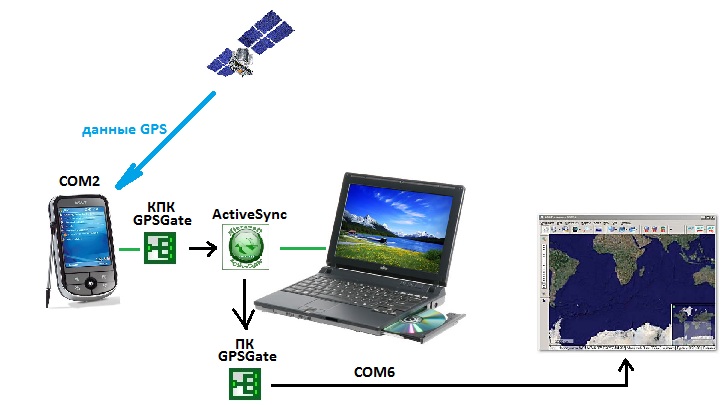
Здесь схема будет простой:
- сигнал GPS поступает на КПК через аппаратный порт COM2 (в моём случае);
- КПК синхронизирован с ноутбуком при помощи ActiveSync;
- C помощью приложения GPSGate установленном на КПК сигнал GPS перенаправляется с COM2 на порт ActiveSync;
- Программа GPSGate, установленная на ноутбуке, получает сигнал с порта ActiveSync и перенаправляет его на виртуальный COM-порт (в моем случае COM6);
- В навигационной программе, установленной на ноутбуке, указываем в качестве источника GPS-сигнала наш виртуальный порт, созданный в GPSGate.
Теперь перейдем от теории к практике.
Будем считать, что программа GPSGate уже установлена на нашем КПК.
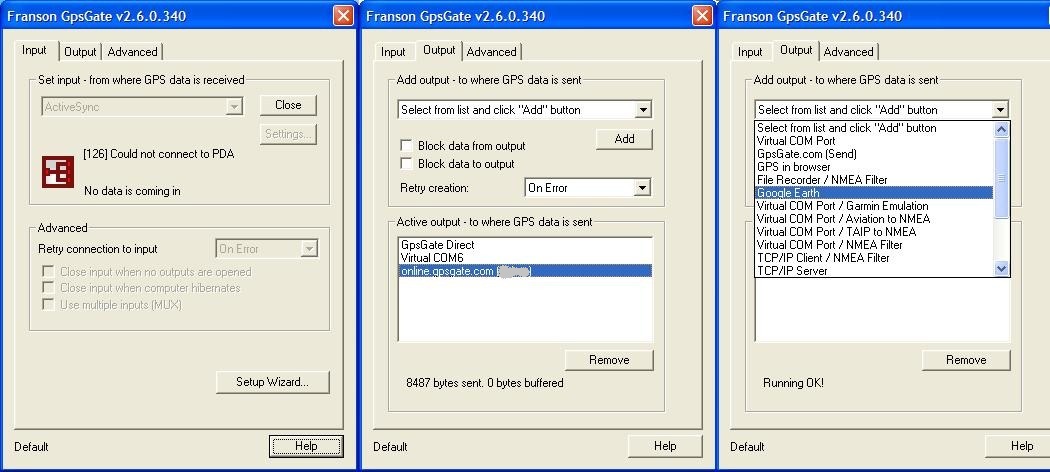
Производим настройку программы:
- Во вкладке «Input» указывается аппаратный порт Вашего GPS-приёмника. На КПК — это, как правило, порт COM2. Можно уточнить, зайдя в Контрольную панель — Внешний GPS — Оборудование.
- На вкладке «Output» указываются получатели сигнала GPS.
Здесь из выпадающего списка выбираем «ActiveSync«, чтобы полученный GPS-сигнал перенаправлялся на порт подключения КПК и ноутбука. - Теперь можно выбрать меню «Online«. Значки должны гореть зелёным (включены), что означает, что в данный момент идет соединение со спутниками.
Если процедуры получения и передачи координат проходят успешно, то значок на панели горит зеленым цветом. Если устройство готово, но координаты еще не получены (спутники не пойманы) — ярлычок программа горит жёлтым цветом.
Сейчас мы добились передачи GPS-сигнала с КПК на ноутбук.
Здесь же можно продублировать передачу GPS-сигнала на сервер GPSGate, для мониторинга Вашего положения (нужна предварительная регистрация на сайте).
Для этого необходимо на вкладке «Output» добавить пункт «gpsgate.com (Send)» и в настройках подключения к серверу указать Ваши логин/пароль на сайте gpsgate.com. Передача данных с КПК на сервер будет осуществляться средствами сотовой связи. Если у Вас есть 3g-модем, то можно сделать аналогичные настройки в программе
GPSGate, установленной на ноутбуке. 
Переходим к настройке ноутбука
Предполагается, что здесь уже установлены: ActiveSync, GPSGate и SASPlanet (либо Google «Планета Земля»).
- В настройках GPSGate выбираем «Input» — ActiveSync(т.к. источник GPS-сигнала у нас будет ActiveSync);
- В «Output«выбираем Virtual COM-Port (Получатель GPS-сигнала будет виртуальный порт, например, COM-6);
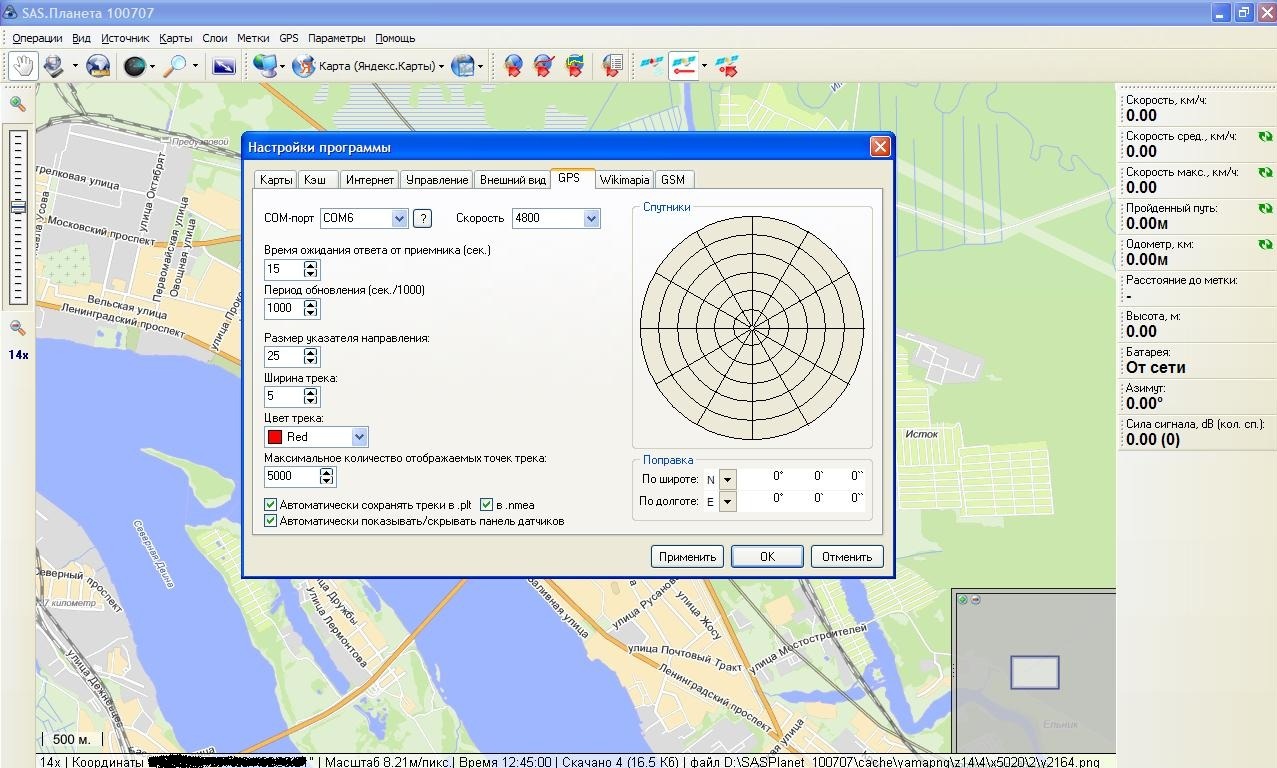
- В настройках программы SASPlanet: Параметры — Настройка программы — GPS
В СОМ-порт указываем наш Virtual COM-Port СОМ-6.
На этом основные настройки программ закончились.
SASPlanet имеет большое количество карт (Яндекс, Навител, Гугл и т.п)
В настройках в Источнике лучше указать „Интернет + Кэш“, тогда уже просмотренные карты будут загружаться из Кэша (из памяти ноутбука), а новые из интернета.
Поэтому будет логичнее, для экономии траффика, заранее просмотреть как можно больший участок, который вы предполагаете посетить в своем путешествии.
Что в итоге?
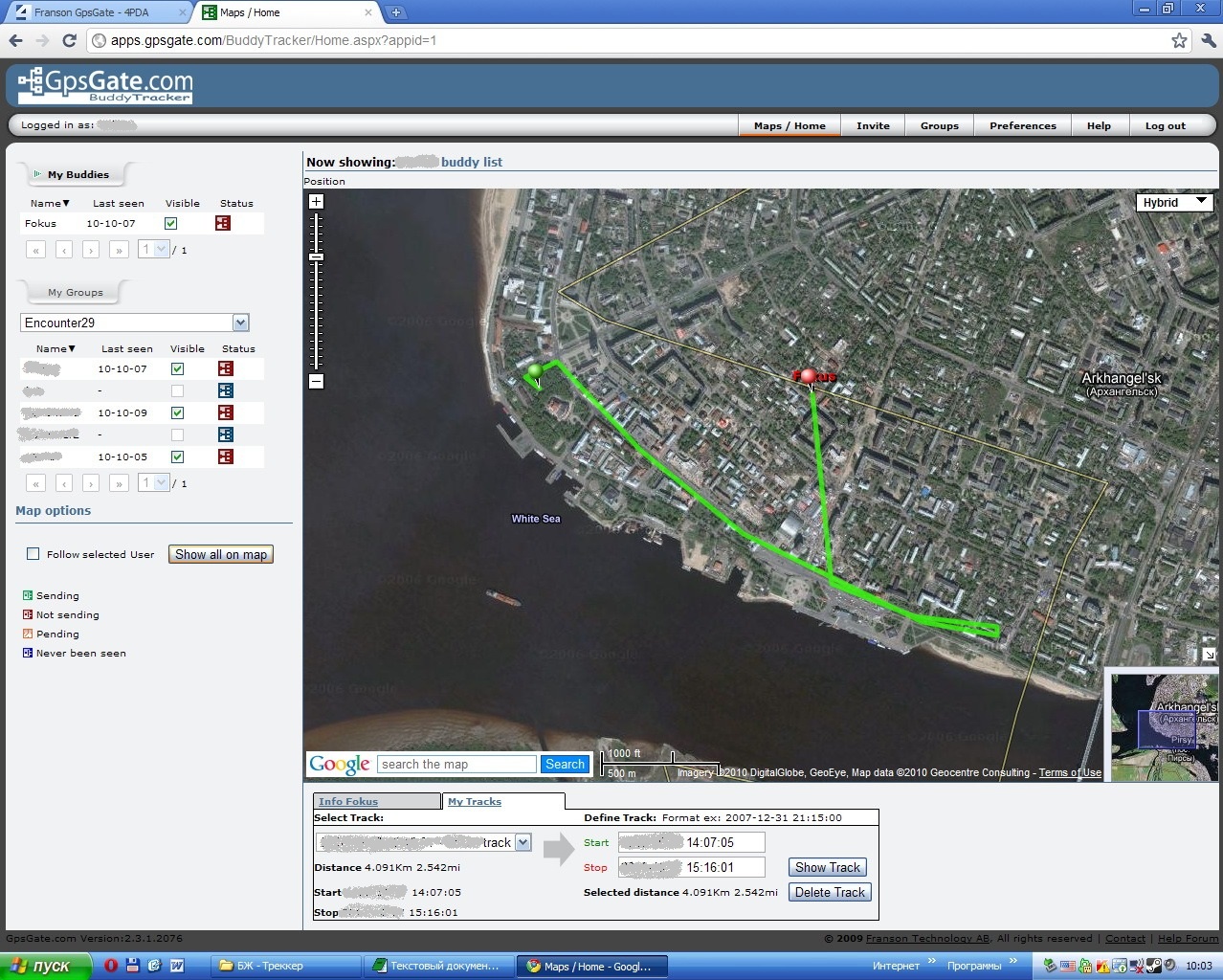
Мы получаем сигнал GPS на внешнее устройство и передаем его на ноутбук, где данные GPS обрабатываются и мы получаем наше текущее расположение привязанное к растровой или векторной карте в программе SASPlanet (любой другой аналогичной).
Параллельно с этим данные о нашем движении и текущем месторасположении отсылаются на сервер. Т.о. можно удаленно просматривать наше местоположение и маршрут за указанный промежуток времени.
Для чего?
Я использую это во время командных активных городских игр:
1) Штаб удаленно контролирует и координирует одновременно перемещение всех экипажей команды.
2) Навигационные программы на ноутбуке обладают более широкой функциональностью и наглядностью, чем в портативных GPS-устройствах. Можно быстро спланировать и скоординировать свой маршрут, выбрать из множества карт наиболее подходящую.
Многие путешественники по бездорожью связывают свои gps-устройства с более компактными нетбуками и используют программу OziExplorer с растровыми топографическими картами, обладающими, как правило большей информативностью о рельефе местности.
Любителям классического туризма так же будет интересней наблюдать свое перемещение по большой интерактивной карте, на которой можно увидеть близлежащие достопримечательности, отображаемые на Google-карте.
Во время поездки, можно поделиться своим местоположением с родственниками и друзьями, которые смогут проследить ваш маршрут.
Модули GPS в Arduino: подключение NEO 6 и обзор программ U-Center
GPS-модули позволяют вашему автономному устройству отслеживать свои координаты и параметры перемещения. Такая функциональность важна для всевозможных трекеров, умных ошейников и рюкзаков. В этой статье мы сделали попытку краткого обзора GPS-модулей и программ для работы с GPS на компьютере. Подключение к ардуино рассмотрено на примере наиболее популярного модуля NEO 6.0
Обзор программ для работы с GPS на компьютере
U-Center
Ссылка на скачивание – https://www.u-blox.com/en/product/u-center-windows
Программа u-center используется для работы с GNSS-проемниками от фирмы U-Blox. С помощью этого программного обеспечения можно тестировать точность позиционирования, изменять конфигурацию ресивера и проводить общую диагностику, обрабатывать полученные данные и отображать их в режиме реального времени. Координаты приемник получает с помощью GPS, ГЛОНАСС. Полученную информацию можно экспортировать и показывать в картах Google Maps, Google Earth. Программа позволяет создавать двухмерные диаграммы, гистограммы и другие виды графиков. u-center можно использовать при работе с несколькими приемниками.
Возможности программного обеспечения U-Center:
- Работа с Windows;
- Чтение NMEA , SiRF данных, UBX;
- Вывод полученных данных в виде текста и графиков;
- Запись данных, и воспроизведение;
- Полное управление модулем GPS;
- Возможность изменения конфигурации GPS-модуля;
- Запись новой конфигурации в модуль;
- Запись конфигурации в файл формата .txt;
- Обновление прошивки модуля;
- Возможность холодного, теплого и горячего старта модуля.
Программа позволяет оценивать работоспособность приемника, анализировать его быстродействие и устанавливать его настройки. Помимо U-Center могут использоваться и другие программы, например, Visual GPS, Time Tools GPS Clock и другие.
Visual GPS
Эта программа используется для отображения GPS данных по протоколу NMEA 0183 в графическом виде. Программа позволяет записывать лог GPS данных в файл. Существует два режима работы в программе – в первом Visual GPS связывается с приемником GPS, а во втором Visual GPS считывает показания NMEA из файла. Программа имеет 4 основных окна – Signal Quality (качество сигнала), Navigation (навигация), Survey (исследование), Azimuth and Elevation (азимут и высота).
Time Tools GPS Clock
Эта программа работает на Windows и любых рабочих станциях, она проверяет время со стандартного приемника времени NMEA GPS, который подключен к компьютеру, и позволяет синхронизировать время на ПК. Отображается информация о времени, дате, состоянии GPS, полученная от приемника. Недостатком программы является невозможность высокоточного определения времени, так как GPS-устройства не имеют секундного импульса для последовательного порта компьютера.
GPS TrimbleStudio
Ссылка на скачивание http://softwaretopic.informer.com/trimble-gps-studio/
Программное обеспечение используется для работы с приемником Copernicus в Windows. Программа отображает принимаемые навигационные данные. Полученные координаты можно отобрать на картах Google Maps, Microsoft Visual Earth. Все установленные настройки приемника можно сохранить в конфигурационном файле
Fugawi
Ссылка на скачивание http://www.fugawi.com/web/products/fugawi_global_navigator.htm
Программа используется для планирования маршрута, GPS навигации в реальном времени. Программа позволяет записывать и сохранять маршруты и путевые точки на картах. Навигация производится как на суше, так и на воде и в воздухе. В программе используются различные виды цифровых карт – топографические карты, стандарты NOAA RNC, отсканированные копии бумажных карт, Fugawi Street Maps.
3D World Map
Ссылка на скачивание www.3dwamp.com
В этой программе можно увидеть землю в трехмерном виде. Используется как удобный географический справочник, в котором можно узнать информацию 269 странах и тридцати тысячах населенных пунктов, производить измерение между двумя точками, воспроизводить аудиозаписи.
Обзор GPS-модулей для Ардуино
Модуль EM-411. Устройство создано на базе высокопроизводительного чипа SiRF Star III, который обладает низким потреблением энергии. Модуль имеет большой объем памяти для сохранения данных альманаха, поддерживает стандартный протокол NMEA 0183. Время холодного старта составляет около 45 секунд.
VK2828U7G5LF. Этот модуль построен на базе чипа Ublox UBX-G7020-KT. С его помощью можно получать координаты по GPS и ГЛОНАСС. В приемнике имеется встроенная память, в которую можно сохранять настройки. Модуль оснащен встроенной керамической антенной, работает по протоколу NMEA 0183. Напряжение питания модуля 3,3-5В.
SKM53 GPS. Один из самых дешевых модулей, обладающий низким потреблением тока. Время холодного запуска примерно 36 секунд, горячего – 1 секунда. Для позиционирования используются 66 каналов, для слежения 22 канала. В модуле имеется встроенная GPS антенна, устройство обеспечивает высокую производительность навигации при различных условиях видимости.
Neo-6M GPS. Приемник производится компанией u-blox. В этом модуле используются новейшие технологии для получения точной информации о местоположении. Напряжение питания модуля 3-5В. Линейка устройств представлена типами G, Q, M, P, V и T со своими уникальными характеристиками. Время холодного старта около 27 секунд.
locosys 1513. Этот модуль поддерживает работу с GPS, ГЛОНАСС, Galileo, QZSS, SBAS. Базируется на чипе MediaTek MT333, который обладает низким энергопотреблением, высокой чувствительностью и стабильной работой в различных условиях. В приемнике имеется поддержка текстового протокола управления. Время холодного старта примерно 38 секунд.
Arduino GPS модуль GY-NEO6MV2
Технические характеристики модуля:
- Напряжение питания 3,3-5В;
- Интерфейс UART 9600 8N1 3.3V;
- Протокол NMEA;
- Вес модуля 18 гр.;
- Наличие EEPROM для сохранения настроек;
- Наличие встроенной батареи;
- Возможность подключения антенны к разъему U-FL;
- Время холодного старта примерно 27 секунд, время горячего старта – 1 секунда;
- Наличие более 50 каналов позиционирования;
- Частота обновления 5 Гц;
- Рабочие температуры от -40С до 85С.
Модуль широко используется для коптеров, определения текущего положения малоподвижных объектов и транспортных средств. Полученные координаты можно загрузить в карты Google Maps, Google Earth и другие.
После холодного старта модуля начинается скачивание альманаха. Время загрузки – не более 15 минут, в зависимости от условий и количество спутников в зоне видимости.
Распиновка: GND (земля), RX (вход для данных UART), TX (выход для данных UART), Vcc – питание от 3,3В до 5 В.
Для подключения потребуются модуль GY-NEO6MV2, плата Ардуино, провода, антенна GPS. Соединение контактов: VCC к 5V, GND к GND, RX к 9 пину на Ардуино, TX к 10 пину. Затем Ардуино нужно подключить к компьютеру через USB.
Для работы потребуется подключить несколько библиотек. SoftwareSerial – требуется для расширения аппаратных функций устройства и обработки задачи последовательной связи. Библиотека TinyGPS используется для преобразования сообщений NMEA в удобный для чтения формат.
Проверка работы через программу U-Center
Как упоминалось выше, модуль производится компанией u-blox, поэтому для настройки приемника используется программа U-Center.
При подключении к UART приемник отправляет сообщения при помощи протокола NMEA раз в секунду. С помощью программы можно настраивать передаваемые сообщения.
Чтобы настроить модуль, нужно подключить его через USB-UART(COM-UART) преобразователь. Настроить подключение можно с помощью меню Receiver-Port . Как только будет установлено соединение, загорится зеленый индикатор. Приемник начнет устанавливать соединения со спутниками, после чего на экране появятся текущие координаты, время и другая информация. Все сообщения появляются в окне Messages. В меню View – Messages можно выбрать сообщения, которые будут передаваться к микроконтроллеру. В зависимости от поставленной задачи, можно уменьшить количество отправляемых сообщений, что увеличит скорость обработки данных и облегчит алгоритм разбора сообщений контроллером.
Если не устанавливается связь со спутником, нужно проверить, подключена ли антенна. Затем нужно проверить напряжение питание, оно должно быть 5В. Если соединение так и не устанавливается, можно поместить модуль к окну или выйти на открытую территорию.
Посмотреть передающиеся данные можно через меню View.
Все сообщения начинаются символом $, следующие за ним символы – идентификаторы сообщения. GP- это глобальная система, следующие 3 буквы показывают, какая информация содержится.
RMC – наименьшая навигационная информация (время, дата, координаты, скорость, направление).
GGA – зафиксированная информация позиционирования. Записаны время, координаты, высота, статус определения местоположения, количество спутников.
Проверка работы через Arduino IDE
Работать с модулем можно также через стандартную среду разработки Arduino IDE. После подключения модуля к плате, нужно загрузить скетч и посмотреть на результат. Если на мониторе появится бессвязный набор знаков, нужно отрегулировать скорость интерфейса Ардуино с компьютером и скорость интерфейса модуля с контроллером.
Скетч для вывода данных о местоположении.
# include //подключение необходимых для работы библиотек
SoftwareSerial gpsSerial(8, 9); //номера пинов, к которым подключен модуль (RX, TX)
gpsSerial.begin(9600); // установка скорости обмена с приемником
if (millis() — start > 1000) //установка задержки в одну секунду между обновлением данных
//в библиотеке TinyGPS имеется ошибка: не обрабатываются данные с \r и \n
После того, как код будет залит, нужно подождать несколько секунд (время холодного старта), чтобы устройство смогло определить местоположение и начать показывать координаты. Как только устройство начнет свою работу, на плате будет мигать светодиод.
В мониторе порта появятся данные широты и долготы. Также будет получено значение текущей даты и времени по Гринвичу. Установить свой часовой пояс можно вручную – это делается в строке Serial.print(static_cast(hour+8));
Заключение
Как видим, для начал работы с GPS не требуется каких-то совсем уж сложных манипуляций. На помощь приходят готовые модули или шилды, взаимодействующие с Arduino через UART. Для облегчения написания скетчей можно использовать готовые библиотеки. Кроме того, любой GPS-модуль можно протестировать без Ардуино, подключив к компьютеру и воспользовавшись специальным софтом. Обзор наиболее популярных программ мы привели в этой статье.